Tópico(s) Artigo
-
 Rua Direita
Rua Direita
Pela primeira vez, uma equipa de investigadores do Instituto de Sistemas e Robótica (ISR) da Universidade de Coimbra (UC) e do Instituto Politécnico de Tomar (IPT) desenvolveu um sistema de interface cérebro-computador que garante praticamente 100 por cento de fiabilidade e precisão no controlo de cadeiras de rodas através do cérebro, sem exigir grande esforço mental ao utilizador.
As cadeiras de rodas guiadas pelo cérebro apresentam-se como uma solução promissora para pessoas com deficiências motoras graves, que não podem usar interfaces convencionais. Contudo, a baixa fiabilidade e precisão das interfaces cérebro-computador (ICCs) baseadas em eletroencefalografia (EEG) e o elevado esforço mental exigido ao utilizador – que fornece os comandos por meio de sinais cerebrais para conduzir a cadeira de rodas, sem atividade muscular –, inviabilizam a sua utilização, por razões de segurança.
Para ultrapassar estes grandes obstáculos, o sistema proposto pela equipa do ISR e IPT, cujos resultados já se encontram publicados na IEEE Transactions on Human-Machine Systems, assenta numa nova abordagem que combina três componentes: ritmo personalizado, comandos de tempo ajustado e controlo colaborativo.
Ou seja, esclarece Gabriel Pires, investigador principal do projeto, «no mesmo sistema é possível a ICC detetar automaticamente quando o utilizador pretende ou não enviar um comando, permitindo que este não tenha de estar permanentemente focado, mas sim apenas quando pretende enviar um comando, ao seu ritmo; o tempo para deteção da intenção do utilizador é também ajustado automaticamente para permitir um desempenho constante, sendo por exemplo menos suscetível a desatenções ou fadiga; e, ainda, um controlo colaborativo entre o utilizador e a máquina».
Este controlo colaborativo significa que a cadeira de rodas «tem um sistema de navegação que, por um lado, realiza as manobras finas de navegação, aliviando o utilizador desse esforço, e, por outro lado, corrige/interpreta possíveis comandos errados enviados pela ICC», revela o investigador.
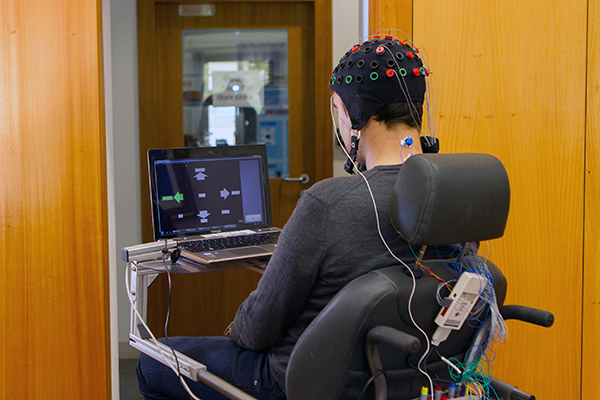
A viabilidade do sistema foi validada em várias experiências realizadas com 6 pessoas com deficiências motoras graves, da Associação de Paralisia Cerebral de Coimbra (APCC), e 7 pessoas sem deficiência (grupo de controlo). Os participantes tinham de efetuar percursos de navegação diferentes em ambientes semelhantes aos de um escritório, como corredores, passagem de portas, gabinetes, acessos e desvio de obstáculos e de pessoas. «Por exemplo, uma das tarefas consistia na passagem por portas estreitas, que é uma das tarefas mais desafiantes em termos de navegação móvel dadas as dimensões da cadeira de rodas», sublinha Gabriel Pires.
Para conseguir testar a interface, a equipa teve de desenvolver o sistema navegação da cadeira de rodas, adaptar, do ponto de vista ergonómico, a cadeira para poder ser usada por pessoas com limitação motora e desenvolver os métodos de descodificação dos sinais eletroencefalográficos da ICC.
As experiências provaram um nível de precisão e fiabilidade sem precedentes, superior a 99%, destaca o investigador do ISR e docente no Instituto Politécnico de Tomar: «o aumento da precisão de forma fiável foi uma grande conquista, ou seja, mantendo o desempenho elevado ao longo do tempo, independentemente das condições. Na verdade, em alguns conjuntos de experiências obtivemos 100% de precisão com o grupo de controlo e 99.6% com o grupo de pessoas com deficiência motora».
Estes resultados mostram, pela primeira vez, que é possível «conceber sistemas controlados por ICCs com elevado desempenho e fiabilidade e controlados de forma natural (sem elevado esforço mental do utilizador e ao seu ritmo) por pessoas com forte limitação motora», afirma Gabriel Pires, frisando que esta avaliação foi obtida «de forma quantitativa, mas também qualitativa através de questionários colocados aos participantes. Os cenários de teste, embora realistas, não deixam de ser bastante estruturados e menos complexos dos que encontramos em ambiente doméstico no dia-a-dia».
No entanto, apesar de os resultados serem altamente promissores, representando um passo de gigante em direção ao uso desta tecnologia, o docente e investigador previne que o sistema desenvolvido ainda «não possui a maturidade para entrar no mercado. Para além de estas experiências terem decorrido em ambiente relativamente controlado, muito menos complexo do que os ambientes domésticos, um outro desafio prende-se com os sistemas de aquisição dos sinais eletroencefalográficos».
Por outro lado, conclui, «a montagem e ergonomia dos elétrodos ainda terá melhorar. Finalmente, para utilização do sistema em ambientes domésticos mais dinâmicos e exigentes, teremos de introduzir mais módulos de perceção do meio circundante, um trabalho que já estamos a iniciar».
Esta nova interface cérebro-computador foi desenvolvida no âmbito do projeto de investigação e desenvolvimento (I&D) “B-RELIABLE: Métodos para melhoria da fiabilidade e a interação em sistemas de interface cérebro-máquina através da integração da deteção automática de erros”, cofinanciado por fundos europeus e pela Fundação para a Ciência e a Tecnologia (FCT). Para além de Gabriel Pires, a equipa que criou a ICC é constituída por Aniana Cruz, Ana Lopes, Carlos Carona e Urbano J. Nunes.
Gosto do artigo
Palavras-chave
Publicado por


Copyright © 2025, Rua Direita . Todos os direitos reservados.